

{kind=link}
კემბრიჯის უნივერსიტეტის მკვლევარებმა შექმნეს პირველი გაძლიერებული რეალობის დისპლეი, რომელიც ეფუძნება LiDAR ტექნოლოგიას მანქანებში გამოსაყენებლად.
კემბრიჯის უნივერსიტეტის, ოქსფორდის უნივერსიტეტისა და ლონდონის საუნივერსიტეტო კოლეჯის (UCL) მკვლევარების მიერ შემუშავებული ტექნოლოგია დაფუძნებულია LiDAR-ზე - ტექნოლოგია შორეული ობიექტების შესახებ ინფორმაციის მოპოვებისა და დამუშავებისთვის აქტიური ოპტიკური სისტემების გამოყენებით, რომლებიც იყენებენ სინათლის შთანთქმის და გაფანტვის ფენომენებს ოპტიკურად. გამჭვირვალე მედია.
თემაზე: როგორ წარმოიდგენდნენ ადამიანები მომავალს ასი წლის წინ
LiDAR-ის მონაცემების საფუძველზე იქმნება გზის ობიექტების ულტრა მაღალი გარჩევადობის ჰოლოგრაფიული გამოსახულებები, რომლებსაც მძღოლი ხედავს.
ცენტრალური ლონდონის ქუჩებიდან შეგროვებული მონაცემების მიხედვით, ჰოლოგრაფიული გამოსახულებები მძღოლის მხედველობის ველში ჩნდება მათი რეალური მდებარეობის მიხედვით, რითაც ქმნის გაძლიერებულ რეალობას. ეს განსაკუთრებით სასარგებლოა, როდესაც ისეთი ობიექტები, როგორიცაა საგზაო ნიშნები იმალება ხეების ან სატვირთო მანქანების მიღმა. ახალი განვითარება საშუალებას გაძლევთ იხილოთ ფაქტიურად დაბრკოლებების მეშვეობით.
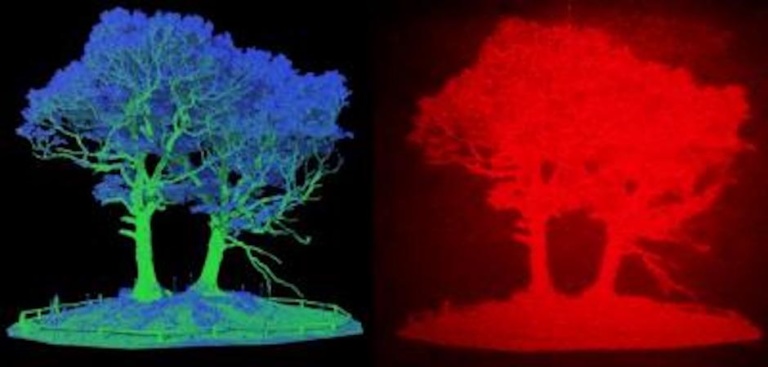
LiDAR-ის გამოყენებით მკვლევარებმა დაათვალიერეს Male Street, მთავარი ქუჩა ცენტრალურ ლონდონში. მილიონობით პულსი გაიგზავნა რამდენიმე პოზიციიდან მალეს ქუჩის გასწვრივ. შემდეგ LiDAR მონაცემები გაერთიანდა წერტილის ღრუბლის მონაცემებთან, რის შედეგადაც შეიქმნა 3D მოდელი.

ექსპერტები განმარტავენ, რომ მიუხედავად იმისა, რომ მონაცემები გროვდება სტაციონარული პლატფორმიდან, ეს იქნება შემდეგი თაობის ავტონომიურ მანქანებში გამოყენებული სენსორების მსგავსი. ამ მიზნით, მკვლევარები მუშაობენ ოპტიკური კომპონენტების მინიატურიზაციაზე, რათა მათ მოთავსდეს მანქანაში, შემდეგ კი ამოწმებენ მანქანებს კემბრიჯის საჯარო გზებზე.
მომავალში, გუნდი იმედოვნებს, რომ მოახდინოს საპროექციო დისპლეის ადგილმდებარეობის პერსონალიზაცია და შექმნას ალგორითმი, რომელსაც შეუძლია სხვადასხვა ობიექტების მრავალი ფენის პროექცია, რომლებიც თავისუფლად შეიძლება განთავსდეს მძღოლის ხედვის ველში. მაგალითად, პირველ დონეზე, უფრო დიდ მანძილზე საგზაო ნიშანი შეიძლება იყოს უფრო მცირე ზომით დაპროექტებული, ხოლო მეორე დონეზე, უფრო ახლო მანძილზე გამაფრთხილებელი ნიშანი უფრო დიდი ზომით.
ასევე წაიკითხეთ:
- LiDAR iPhone 12 Pro-ში: რა არის და რატომ?
- Huawei ინვესტირებას ახორციელებს 1 მილიარდ დოლარზე მეტი ელექტრო მანქანების ტექნოლოგიებში